Фото: МФТИ
тестовый баннер под заглавное изображение
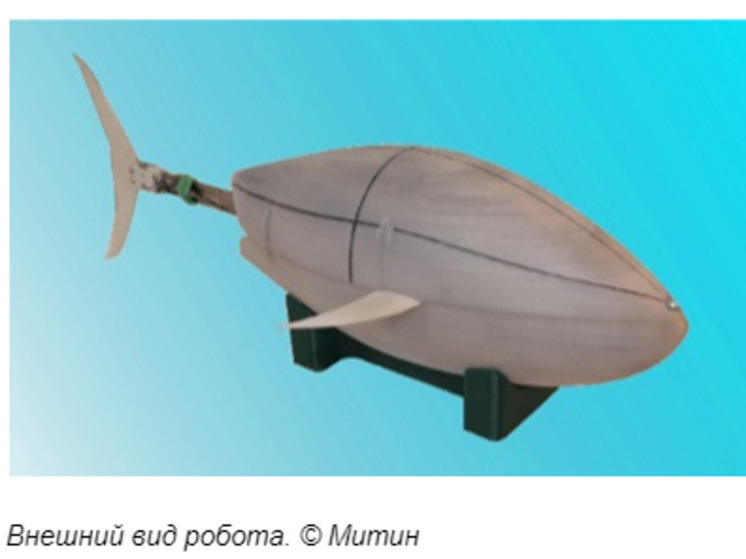
В основе конструкции рыбы-робота — образ желтоперого тунца, рыбы с обтекаемым телом, адаптированным для долгого и экономичного движения в воде.
По словам руководителя исследований, заведующего лабораторией нейробиоморфных технологий МФТИ Виктора Казанцева, робот оснащен поворотными плавниками, балластной цистерной и движителем оригинальной конструкции. В качестве источника питания выступает литий-полимерный аккумулятор, а для взаимодействия с оператором используется канал радиосвязи.
Основным механическим движителем является хвостовой плавник «рыбы», прикрепленный к гибкой пластине, и сервопривод (электрический привод с обратной связью), закрепленный на корпусе. По обеим сторонам пластины расположены тяги из металлических тросиков. При вращении сервопривода они попеременно деформируют гибкую пластину. Такой механизм позволяет реализовать ровное и плавное волнообразное движение хвоста.
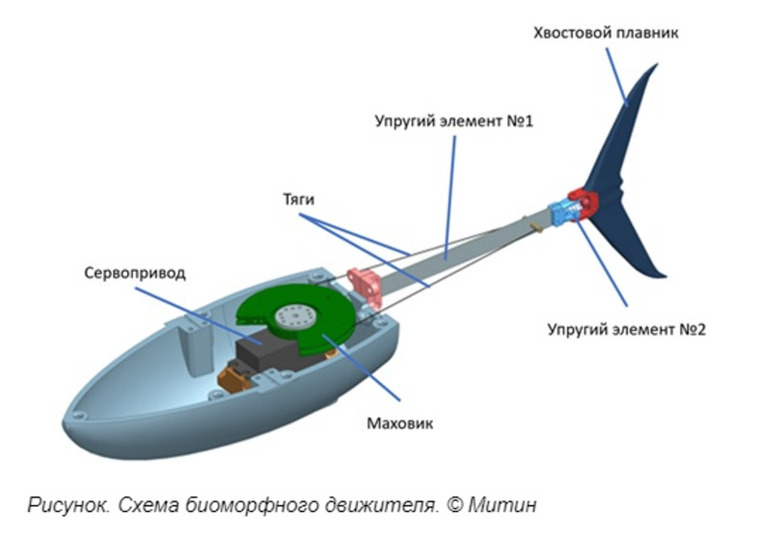
Фото: МФТИ
Второй частью разработки стали «органы чувств» робота. За навигацию аппарата отвечают современные сонары (гидролокаторы), которые «ощупывают» пространство звуковыми волнами на расстоянии до 6 метров. Одновременно с этим встроенный инерциальный модуль отслеживает повороты и положения аппарата в пространстве, а бортовая камера распознает объекты даже в мутной воде.
Эффективность сенсорных систем «тунца» подтвердили испытания в закрытых бассейнах Калининграда и Нижнего Новгорода. Аппарат уверенно распознавал специальные метки с расстояния 1,5 метра даже в условиях плохой видимости.
По словам исследователей, в дальнейшем разработка может стать платформой для тестирования нейроморфных принципов управления, — систем, которые воспроизводят работу центральной нервной системы животных. В текущем году ученые планируют протестировать свободное плавание рыбы-робота в открытых водоемах Нижнего Новгорода.